| |
Case
Study I: Hysteresis - Based Controller |
| |
| Author |
| |
Carla
Martín-Villalba |
| |
Departamento
de Informática y Automática, UNED |
| |
Juan del Rosal
16, 28040 Madrid, Spain |
|
|
|
| |
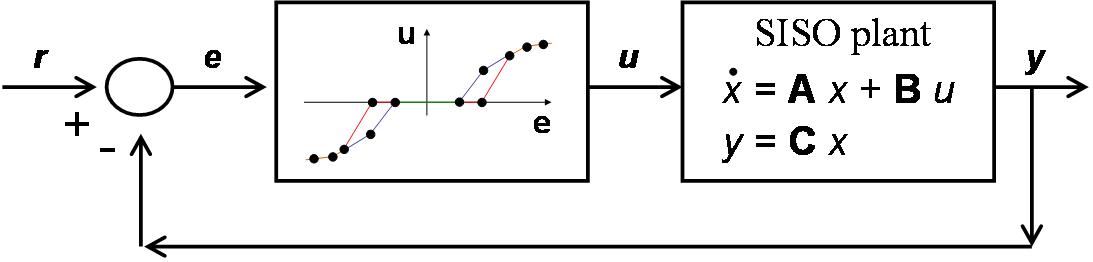
| The interactive simulation
of the control loop shown in Figure 1 is implemented by combining the use
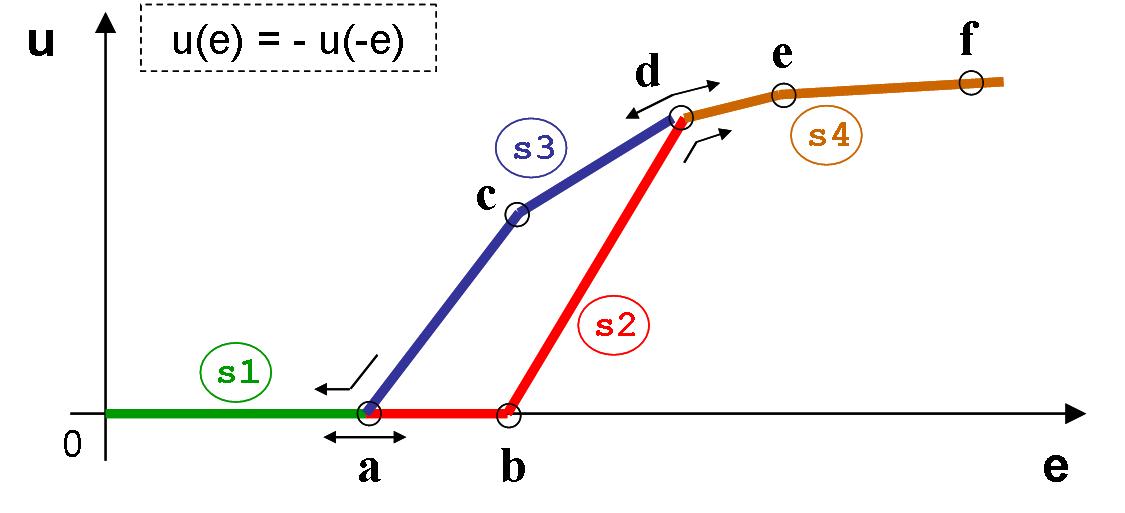
of Sysquake and Modelica/Dymola. The constitutive relation of the hysteresis-based
controller in shown in Figure2. The setpoint is the composition of two signals:
a piecewise linear function and a sine function. The model of the control
loop has been programmed using Modelica language and translated using Dymola.
The execution of the dymosim.exe file generated by Dymola is controlled
by the Sysquake application (i.e., the virtual-lab view) using
sysquakeDymosimInterface functions. |
| |
|
Figure
1: Control loop. |
| |
|
Figure
2: Constitutive relation of the controller. |
| |
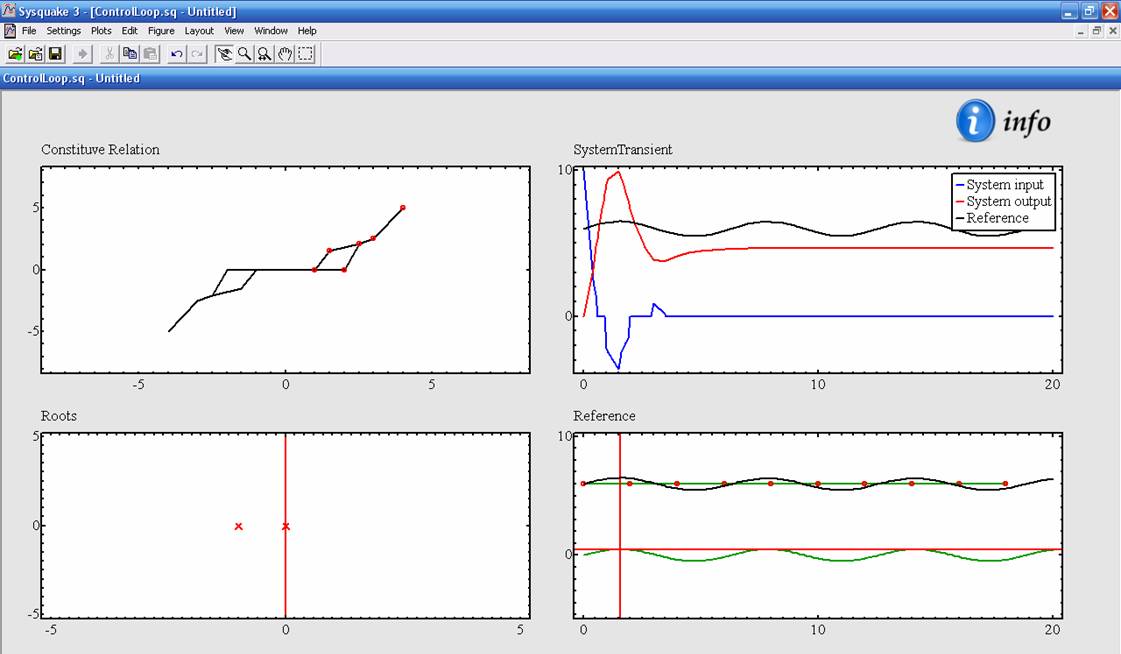
| The view
of the virtual-lab is the Sysquake application shown in Figure 3. The user
can display the virtual-lab view documentation (an HTML page) by pressing
the "info" icon. The system plant transfer function can
be inserted by writing its numerator and denominator in a dialog window
that is display by clicking on the option "System" of
the "Settings" menu. The user can perform a new simulation
run by clicking on the "Run" button placed on the "Settings"
menu. The view is composed of four graphics. Three of them are interactive: |
| - |
"Constitutive
relation" plot (graphic on the upper left). The position
of the {a, b, c, d, e, f} points of the controller constitutive relation
can be changed by dragging the mouse. |
| - |
"Roots"
plot (graphic on the lower left). The plant's zeros and poles can
be changed by clicking on the circles and crosses and by dragging
the mouse. |
| - |
"Reference"
plot (graphic on the lower right). The shape of the piecewise linear
function and the amplitude and frequency of the sine function can
be modified by clicking on the lines and circles that appear in the
graphic and by dragging the mouse. |
|
| |
|
Figure
3: View of the control loop virtual-lab. |
| |
|
| Carla Martin-Villalba |
| Last update: July
2007 |
| euclides
web server
- Dept. Informatica y Automatica, UNED, Juan del Rosal 16, 28040 Madrid,
Spain |