| Name | Description |
|---|---|
| interactiveModel | Interactive model |
| physicalModel | Physical model |
| setParamVar | Model including the when required to change the value of the interactive parameters and input variables |
| StateSelection1 | State variables: liquid level |
| StateSelection2 | State variables: liquid volume |
model interactiveModel "Interactive model"
input Real Iparam[25] "New value of the interactive parameters";
input Real Ivar[2] "New value of the interactive variables";
input Real Istate[8] "New value of the state variables";
input Real CKparam[2]
"Trigger the when that reinitializes the value of the interactive parameters";
input Real CKvar[2]
"Trigger the when that reinitializes the value of the interactive variables";
input Real CKstate[2]
"Trigger the when that reinitializes the value of the state variables";
input Real Enabled[2];
output Real O[16] "Ouput variable";
output Real Release[1] "Release signal";
StateSelection1 SS1( CKparam = CKparam[1],
CKvar = CKvar[1],
CKstate = CKstate[1]);
StateSelection2 SS2( CKparam = CKparam[2],
CKvar = CKvar[2],
CKstate = CKstate[2]);
equation
Iparam = SS1.Iparam;
Istate = SS1.Istate;
Ivar = SS1.Ivar;
Iparam = SS2.Iparam;
Istate = SS2.Istate;
Ivar = SS2.Ivar;
Release = {9.0};
O = if Enabled[1] > 0.5 then
SS1.O else
if Enabled[2] > 0.5 then
SS2.O else
zeros(size(O, 1));
end interactiveModel;
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | isState[8] | Vector controlling the state selection |
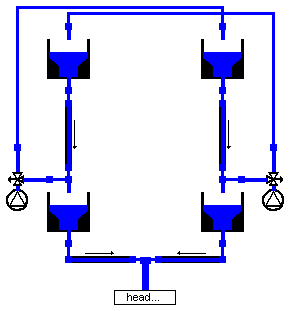
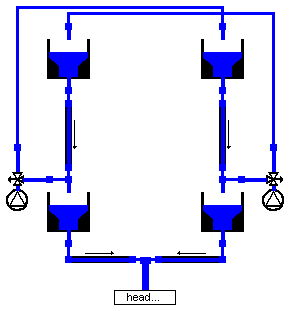
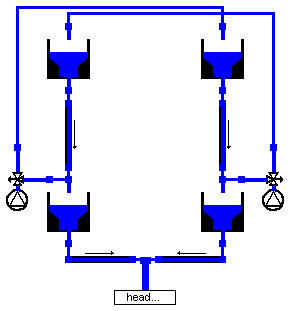
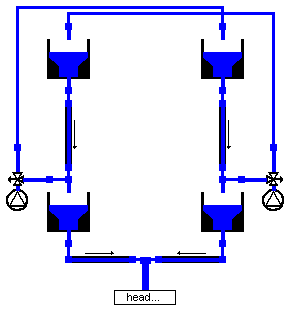
partial model physicalModel "Physical model"
input Real Iparam[25] "New value of the interactive parameters";
input Real Ivar[2] "New value of the interactive variables";
input Real Istate[8] "New value of the state variables";
output Real O[16] "Output vector";
parameter Boolean[8] isState "Vector controlling the state selection";
componentsLIB.tank tank1(hIsState=isState[1], volumeIsState=isState[5]);
componentsLIB.tank tank2(hIsState=isState[2], volumeIsState=isState[6]);
componentsLIB.tank tank3(hIsState=isState[3], volumeIsState=isState[7]);
componentsLIB.tank tank4(hIsState=isState[4], volumeIsState=isState[8]);
componentsLIB.sink sink;
componentsLIB.pipe pipeT3T1(FIsState=false);
componentsLIB.pipe pipeT1Sink(FIsState=false);
componentsLIB.pipe pipeT4T2(FIsState=false);
componentsLIB.pipe pipeT2Sink(FIsState=false);
componentsLIB.pumpTwoWayValve pumpValve1;
componentsLIB.pumpTwoWayValve pumpValve2;
equation
connect(tank1.portBottom, pipeT1Sink.portP);
connect(pipeT1Sink.portN, sink.port);
connect(tank1.portTop, pumpValve1.port1);
connect(tank1.portTop, pipeT3T1.portN);
connect(tank2.portBottom, pipeT2Sink.portP);
connect(pipeT2Sink.portN, sink.port);
connect(tank2.portTop, pumpValve2.port1);
connect(tank2.portTop, pipeT4T2.portN);
connect(tank3.portBottom, pipeT3T1.portP);
connect(tank3.portTop, pumpValve2.port2);
connect(tank4.portBottom, pipeT4T2.portP);
connect(tank4.portTop, pumpValve1.port2);
O = {tank1.h,tank2.h,tank3.h,tank4.h,pipeT3T1.F,pipeT1Sink.F,pipeT4T2.
F,pipeT2Sink.F,tank1.volume,tank2.volume,tank3.volume,tank4.volume,
-pumpValve1.port1.volFlow, -pumpValve2.port1.volFlow,
-pumpValve2.port2.volFlow, -pumpValve1.port2.volFlow};
end physicalModel;
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | isState[8] | Vector controlling the state selection |
model setParamVar
"Model including the when required to change the value of the interactive parameters and input variables"
extends physicalModel;
Real CKparam
"Trigger the when that reinitializes the value of the interactive parameters";
Real CKvar
"Trigger the when that reinitializes the value of the interactive variables";
protected
Boolean CKparamIs0( start = true, fixed=true);
Boolean CKvarIs0( start = true, fixed=true);
equation
when CKparam > 0.5 and pre(CKparamIs0) or
CKparam < 0.5 and not pre(CKparamIs0) then
CKparamIs0 = CKparam < 0.5;
reinit(pumpValve1.gamma, Iparam[1]);
reinit(pumpValve1.k, Iparam[2]);
reinit(pumpValve2.gamma, Iparam[3]);
reinit(pumpValve2.k, Iparam[4]);
reinit(tank1.tankSection, Iparam[5]);
reinit(tank2.tankSection, Iparam[6]);
reinit(tank3.tankSection, Iparam[7]);
reinit(tank4.tankSection, Iparam[8]);
reinit(pipeT3T1.a, Iparam[9]);
reinit(pipeT1Sink.a, Iparam[10]);
reinit(pipeT4T2.a, Iparam[11]);
reinit(pipeT2Sink.a, Iparam[12]);
reinit(tank1.alfa1, Iparam[13]);
reinit(tank2.alfa1, Iparam[14]);
reinit(tank3.alfa1, Iparam[15]);
reinit(tank4.alfa1, Iparam[16]);
reinit(tank1.alfa2, Iparam[17]);
reinit(tank2.alfa2, Iparam[18]);
reinit(tank3.alfa2, Iparam[19]);
reinit(tank4.alfa2, Iparam[20]);
reinit(tank1.beta, Iparam[21]);
reinit(tank2.beta, Iparam[22]);
reinit(tank3.beta, Iparam[23]);
reinit(tank4.beta, Iparam[24]);
tank1.generateEvents = Iparam[25] > 0.5;
tank2.generateEvents = Iparam[25] > 0.5;
tank3.generateEvents = Iparam[25] > 0.5;
tank4.generateEvents = Iparam[25] > 0.5;
end when;
when CKvar > 0.5 and pre(CKvarIs0) or
CKvar < 0.5 and not pre(CKvarIs0) then
CKvarIs0 = CKvar < 0.5;
reinit(pumpValve1.v, Ivar[1]);
reinit(pumpValve2.v, Ivar[2]);
end when;
end setParamVar;
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | isState[8] | Vector controlling the state selection |
model StateSelection1 "State variables: liquid level"
extends setParamVar(isState={true,true,true,true,false,false,false,false});
Real CKstate
"Trigger the when that reinitializes the value of the state variables";
protected
Boolean CKstateIs0( start = true, fixed=true);
equation
when CKstate > 0.5 and pre(CKstateIs0) or
CKstate < 0.5 and not pre(CKstateIs0) then
CKstateIs0 = CKstate < 0.5;
reinit(tank1.h, Istate[1]);
reinit(tank2.h, Istate[2]);
reinit(tank3.h, Istate[3]);
reinit(tank4.h, Istate[4]);
end when;
end StateSelection1;
| Type | Name | Default | Description |
|---|---|---|---|
| Boolean | isState[8] | Vector controlling the state selection |
model StateSelection2 "State variables: liquid volume"
extends setParamVar(isState={false,false,false,false,true,true,true,true});
Real CKstate;
protected
Boolean CKstateIs0( start = true, fixed=true);
equation
when CKstate > 0.5 and pre(CKstateIs0) or
CKstate < 0.5 and not pre(CKstateIs0) then
CKstateIs0 = CKstate < 0.5;
reinit(tank1.volume, Istate[5]);
reinit(tank2.volume, Istate[6]);
reinit(tank3.volume, Istate[7]);
reinit(tank4.volume, Istate[8]);
end when;
end StateSelection2;